 – Roboticmagazine")
Simultaneous Localization and Mapping (SLAM)
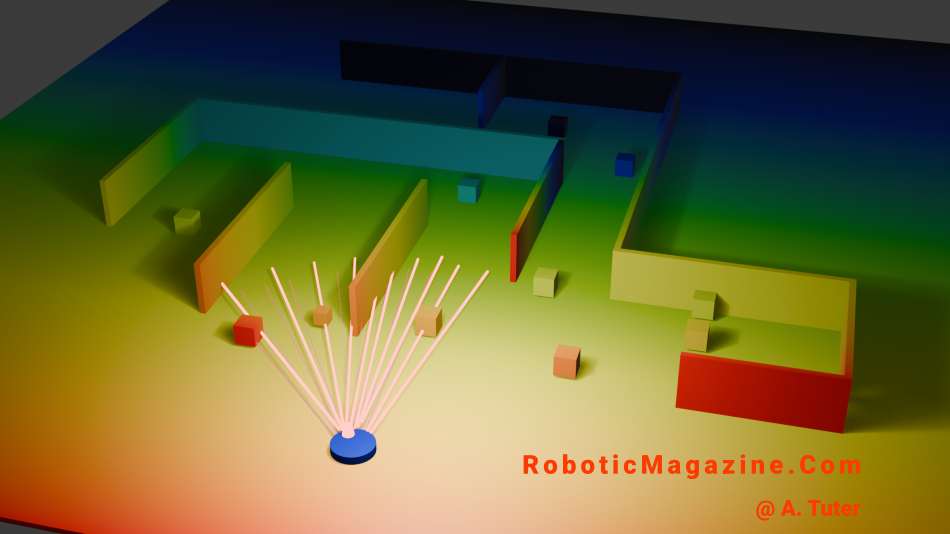
Simultaneous Localization and Mapping (SLAM) is a core expertise in robotics that enables a machine to construct a map of an unknown surroundings whereas concurrently figuring out its personal place inside that map. This functionality is important for robots working in locations the place GPS is unavailable, akin to indoors, deep underground, or inside advanced warehouse layouts. To perform successfully, SLAM combines knowledge from numerous sensors, together with LiDAR, cameras, Inertial Measurement Models (IMUs), and wheel encoders. Because the robotic strikes, the algorithm estimates its movement, detects environmental landmarks, and repeatedly updates each the map and the robotic’s estimated trajectory.
There are a number of mathematical approaches used to unravel the SLAM drawback, every with distinctive strengths:
- Prolonged Kalman Filter (EKF-SLAM): Makes use of probabilistic estimation to trace the robotic and landmarks. Whereas efficient for smaller areas, it turns into computationally costly (O(N^2) complexity) because the map grows bigger.
- Particle Filter (FastSLAM): Represents a number of potential robotic positions concurrently utilizing “particles,” evaluating which of them finest match real-world sensor observations.
- Graph-based SLAM: The fashionable customary that treats robotic poses and sensor measurements as nodes and edges in a graph, which is then mathematically optimized to attenuate error.
- Visible SLAM (V-SLAM): Depends totally on cameras to determine visible options relatively than utilizing laser-based distance sensors.
Regardless of its success, SLAM stays difficult as a result of sensor noise, dynamic environments with shifting objects, and the excessive demand for real-time computation. A important element in overcoming these challenges is loop closure —the power of a robotic to acknowledge a beforehand visited location. When a loop is closed, the system can right the “drift” or amassed place errors that naturally happen over lengthy distances, successfully snapping the map again into correct alignment.
Right this moment, SLAM is a foundational ingredient in a variety of functions. It powers autonomous vacuum cleaners, high-altitude drones, warehouse automation robots, and self-driving autos, whereas additionally serving because the spine for spatial monitoring in augmented actuality (AR) methods.